Robotica
AI Generativa imita il movimento umano per la robotica
Tempo di lettura: 2 minuti. Scopri come la nuova AI generativa sviluppata da un team internazionale imita il movimento umano, migliorando l’adattabilità e la stabilità in robotica.

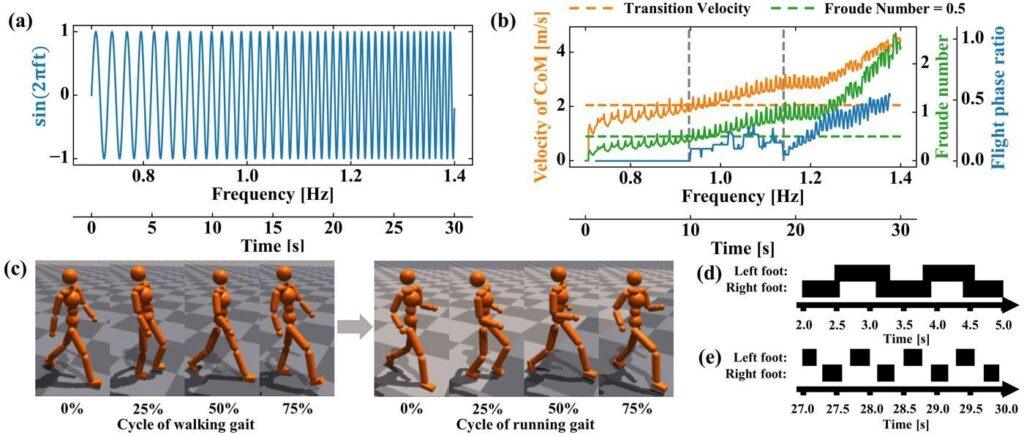
Un gruppo internazionale di ricercatori ha sviluppato un nuovo metodo per imitare il movimento umano nella robotica, combinando generatori di pattern centrali (CPG) e apprendimento profondo per rinforzo (DRL). Questa innovazione non solo replica i movimenti di camminata e corsa, ma genera anche movimenti per frequenze di dati assenti, permette transizioni fluide tra camminata e corsa, e si adatta a superfici instabili.
Dettagli della Ricerca
Pubblicati sulla rivista IEEE Robotics and Automation Letters il 15 aprile 2024, i dettagli di questa ricerca segnano un progresso significativo nella robotica e nell’intelligenza artificiale. Camminare e correre sono attività complesse che coinvolgono ridondanze biologiche, consentendo agli esseri umani di adattarsi agli ambienti variabili. Riprodurre questi movimenti in modo realistico nei robot ha presentato notevoli sfide, soprattutto quando i modelli devono operare in ambienti sconosciuti o complessi.
Innovazioni tecnologiche
I CPG sono circuiti neurali situati nel midollo spinale che, come un direttore d’orchestra biologico, generano schemi ritmici di attività muscolare. In natura, un circuito riflesso lavora in tandem con i CPG per fornire feedback adeguato, permettendo agli animali di regolare la loro velocità e il movimento in base al terreno.
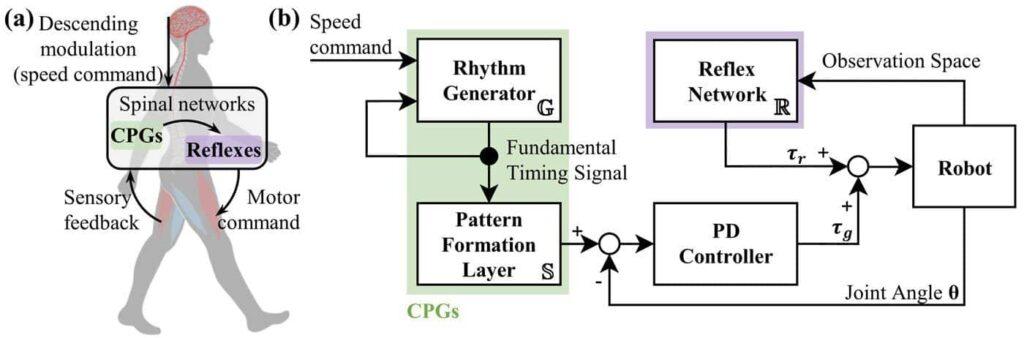
L’approccio dei ricercatori ha combinato l’apprendimento per imitazione, dove un robot apprende imitando i dati di movimento umano, con l’apprendimento profondo per rinforzo, che utilizza reti neurali profonde per gestire compiti più complessi e apprendere direttamente da input sensoriali grezzi. Questo metodo ha superato molti limiti degli approcci esistenti, grazie all’uso di una rete neurale riflessa che supporta i CPG, aumentando significativamente la stabilità e l’adattabilità del movimento generato.
Applicazioni e implicazioni future
Questa ricerca non solo stabilisce nuovi standard per il movimento robotico umanoide, ma apre anche la strada a future applicazioni in vari settori, dalla robotica assistiva all’industria manifatturiera, e potenzialmente alla ricerca e soccorso in ambienti pericolosi o inaccessibili. La capacità di adattarsi e reagire a situazioni dinamiche in tempo reale rappresenta un salto significativo verso robot più autonomi e funzionali.
Il metodo AI-CPG rappresenta un passo avanti significativo nello sviluppo di tecnologie AI generative per il controllo dei robot, con potenziali applicazioni che attraversano diverse industrie. Questo progresso non solo migliora la nostra comprensione dei sistemi biologici complessi ma anche come questi principi possono essere emulati in sistemi artificiali per realizzare robot più efficienti e adattabili.












Robotica
Robot guida addestrati dai cani per non vedenti
Tempo di lettura: 2 minuti. Ricercatori di UMass Amherst sviluppano robot guida per non vedenti, equilibrando autonomia del robot e controllo umano

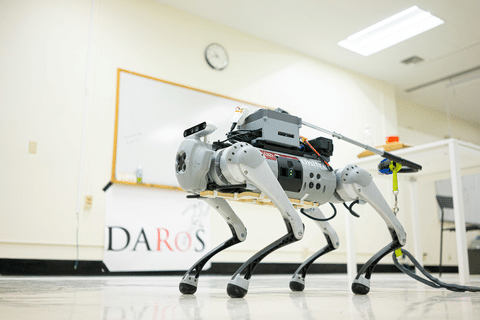
Un team di ricercatori dell’Università del Massachusetts Amherst ha ricevuto il Best Paper Award alla conferenza CHI 2024 per il loro studio su come sviluppare robot guida per persone non vedenti: il team, guidato da Donghyun Kim, ha condotto interviste e sessioni di osservazione con utenti di cani guida e addestratori per identificare le caratteristiche necessarie per rendere i robot guida efficaci e accettati dagli utenti finali.
Limiti dei cani guida e potenziale dei robot
I cani guida offrono una grande autonomia ai loro conduttori, ma solo una piccola parte delle persone non vedenti può permettersene uno, a causa dei costi elevati di addestramento ($40.000) e altre limitazioni come allergie e incapacità fisiche di prendersi cura di un cane. I robot guida potrebbero colmare questa lacuna, ma solo se progettati con le giuste caratteristiche.
Ricerche precedenti e nuovi approcci

Mentre sono stati sviluppati vari robot guida negli ultimi 40 anni, nessuno è stato adottato su larga scala dagli utenti finali. Kim e il suo team hanno cercato di capire prima come le persone utilizzano i cani guida e quali tecnologie attendono, prima di sviluppare i robot stessi. Le loro ricerche hanno rivelato che gli utenti non vedono i cani guida come un sistema di navigazione globale, ma piuttosto come un aiuto per evitare ostacoli locali, con il conduttore che controlla il percorso generale.
Equilibrio tra autonomia del robot e controllo umano
Un tema emerso dalle interviste è stato il delicato equilibrio tra l’autonomia del robot e il controllo umano. I ricercatori hanno scoperto che i conduttori si sentono insicuri se il robot è completamente passivo o completamente autonomo. Invece, una collaborazione tra il robot e il conduttore sembra essere l’approccio preferito.
Caratteristiche chiave per i robot guida
Alcune delle caratteristiche chiave identificate per i robot guida includono una durata della batteria di almeno due ore, necessaria per i pendolari, più orientamenti delle telecamere per evitare ostacoli aerei, sensori audio per rilevare pericoli in arrivo da zone nascoste e la capacità di comprendere comandi come “marciapiede” per indicare di seguire la strada.
Importanza della ricerca e prospettive future
Il lavoro di Kim e del suo team non solo offre linee guida per lo sviluppo di robot guida, ma punta anche a ispirare altri ricercatori nel campo della robotica e dell’interazione uomo-robot. La loro speranza è che, anche se i robot guida non saranno disponibili nel breve termine, questa ricerca possa accelerare la loro realizzazione e implementazione.
Robotica
Il tatto dei Robot potrebbe essere veloce quanto quello umano
Tempo di lettura: < 1 minuto. Un sistema tattile artificiale sviluppato dall’Università di Uppsala permette ai robot di percepire il tatto con la rapidità degli umani.

Un sistema artificiale sviluppato dai ricercatori dell’Università di Uppsala potrebbe permettere ai robot di percepire il tatto con la stessa rapidità degli esseri umani. Questo sistema, ispirato dalla neuroscienza, utilizza impulsi elettrici per processare le informazioni tattili dinamiche nello stesso modo del sistema nervoso umano.
Componenti del sistema tattile artificiale
Il sistema ha tre componenti principali:
- Pelle Elettronica (e-skin): Dotata di sensori che possono rilevare la pressione al tatto.
- Neuroni Artificiali: Convertono i segnali tattili analogici in impulsi elettrici.
- Processore: Elabora i segnali e identifica l’oggetto.
I test hanno coinvolto 22 oggetti diversi per la presa e 16 superfici diverse per il tocco.
Applicazioni e prospettive future
- Protesi: Una mano protesica con questa tecnologia potrebbe sentirsi come parte del corpo del portatore.
- Interazioni Umano-Robot: Le interazioni diventerebbero più sicure e naturali grazie al feedback tattile.
- Monitoraggio Medico: Potrebbe essere utilizzata per monitorare disfunzioni motorie causate da malattie come il Parkinson e l’Alzheimer, o per aiutare i pazienti a recuperare funzionalità perse dopo un ictus.
Obiettivi futuri
I ricercatori stanno anche esplorando la possibilità di sviluppare il sistema in modo che possa percepire dolore e calore, nonché distinguere i materiali, ad esempio legno o metallo. Un altro obiettivo è produrre pelle artificiale per un intero robot, con un numero sufficiente di recettori per permettere una destrezza simile a quella della mano umana.
Finanziamenti e collaborazioni
La ricerca è stata finanziata dal programma di ricerca e innovazione Horizon 2020 dell’Unione Europea, il Consiglio delle Ricerche Svedese, la Fondazione Svedese per la Ricerca Strategica, il programma di ricerca eSSENCE (Svezia), AI4Research (Università di Uppsala), la Fondazione Margaretha af Ugglas e l’infrastruttura nazionale per il supercalcolo in Svezia presso UPPMAX.
Robotica
Robot autonomi con cervelli AI animali
Tempo di lettura: 2 minuti. Scopri come l’intelligenza artificiale ispirata al cervello animale sta rivoluzionando i droni autonomi, rendendoli più veloci ed efficienti dal punto di vista energetico.
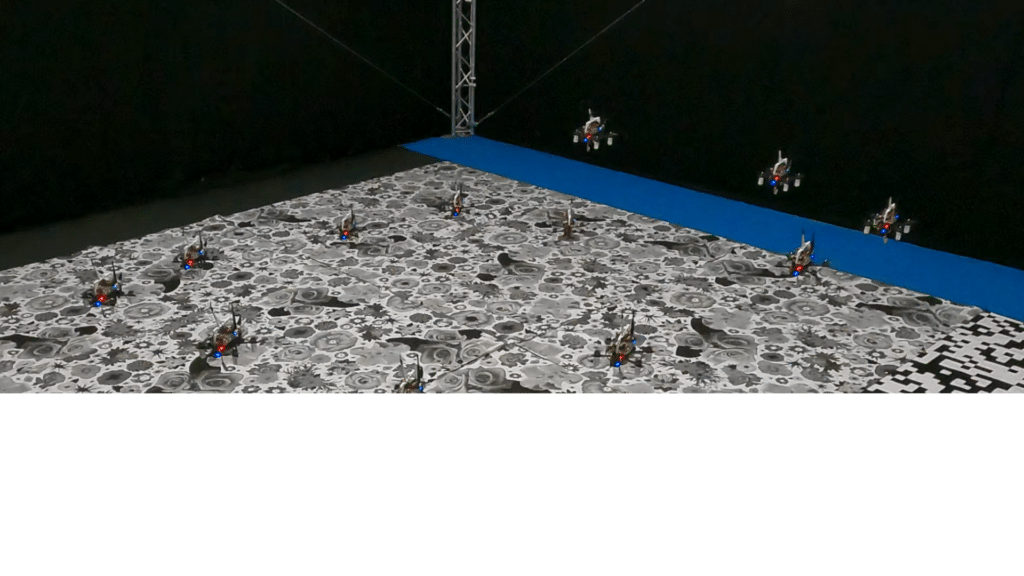
Un team di ricercatori della Delft University of Technology ha sviluppato un drone che vola autonomamente utilizzando l’elaborazione delle immagini neuromorfica e il controllo basato sul funzionamento dei cervelli animali. I cervelli animali usano meno dati ed energia rispetto alle attuali reti neurali profonde che funzionano su GPU. I processori neuromorfici sono quindi molto adatti per piccoli droni poiché non necessitano di hardware e batterie pesanti. I risultati sono straordinari: durante il volo, la rete neurale profonda del drone elabora i dati fino a 64 volte più velocemente e consuma tre volte meno energia rispetto a una GPU.
Apprendimento dai cervelli animali: reti neurali a Spike
L’intelligenza artificiale può fornire ai robot autonomi l’intelligenza necessaria per le applicazioni nel mondo reale. Tuttavia, l’attuale AI si basa su reti neurali profonde che richiedono una notevole potenza di calcolo. I processori per eseguire le reti neurali profonde (GPU) consumano molta energia, un problema per piccoli robot come i droni volanti che possono trasportare risorse limitate.
I cervelli animali elaborano le informazioni in modo diverso dalle reti neurali su GPU. I neuroni biologici elaborano le informazioni in modo asincrono, comunicando principalmente tramite impulsi elettrici chiamati spike. L’invio di tali spike consuma energia, quindi il cervello minimizza gli spike, portando a un’elaborazione sparsa. I processori neuromorfici permettono di eseguire reti neurali a spike, risultando molto più veloci ed efficienti dal punto di vista energetico.
Prima Visione e controllo neuromorfici di un Drone Volante
In un articolo pubblicato su Science Robotics, i ricercatori dimostrano per la prima volta un drone che utilizza la visione e il controllo neuromorfici per il volo autonomo. Hanno sviluppato una rete neurale a spike che elabora i segnali da una fotocamera neuromorfica e fornisce comandi di controllo per determinare la posizione e la spinta del drone. La rete è stata implementata su un processore neuromorfico, il chip di ricerca neuromorfico Loihi di Intel, a bordo di un drone.
Con la sua visione e controllo neuromorfici, il drone può volare a diverse velocità in condizioni di luce variabili, da scure a luminose. Può persino volare con luci tremolanti, che fanno inviare alla fotocamera neuromorfica un gran numero di segnali non correlati al movimento.
Applicazioni future dell’AI Neuromorfica per Piccoli Robot
“L’AI neuromorfica permetterà a tutti i robot autonomi di essere più intelligenti,” afferma Guido de Croon, professore di droni bio-ispirati. “Ma è un fattore abilitante assoluto per piccoli robot autonomi.” All’Università di Tecnologia di Delft, i ricercatori lavorano su piccoli droni autonomi utilizzabili per applicazioni che vanno dal monitoraggio delle colture nelle serre al controllo delle scorte nei magazzini. I vantaggi dei piccoli droni includono sicurezza, capacità di navigare in ambienti stretti e costi ridotti, permettendo di essere dispiegati in sciami. La realizzazione di queste applicazioni dipenderà dall’ulteriore miniaturizzazione dell’hardware neuromorfico e dall’espansione delle capacità verso compiti più complessi come la navigazione.




GitCaught: minacce utilizzano repository GitHub per attacchi malevoli
Tempo di lettura: 2 minuti. GitCaught utilizza GitHub per distribuire malware, evidenziando l'abuso di servizi fidati per cyberattacchi


Vulnerabilità RCE zero-day nei router D-Link EXO AX4800
Tempo di lettura: 2 minuti. Un gruppo di ricercatori di SSD Secure Disclosure ha scoperto una vulnerabilità critica nei router...


SEC: “notificare la violazione dei dati entro 30 giorni”
Tempo di lettura: 2 minuti. La SEC richiede alle istituzioni finanziarie di notificare le violazioni dei dati agli individui interessati...


Microsoft Azure: autenticazione multi-fattore (MFA) obbligatoria da luglio 2024
Tempo di lettura: 2 minuti. Microsoft inizierà a imporre l'autenticazione multi-fattore (MFA) per gli utenti di Azure a partire da...


USA arrestati sospetti dietro schema riciclaggio da 73 milioni
Tempo di lettura: 2 minuti. Gli Stati Uniti arrestano due sospetti accusati di guidare uno schema di riciclaggio di $73...

Quick Assist di Microsoft sfruttato per ingegneria sociale
Tempo di lettura: 2 minuti. Storm-1811 sfrutta Quick Assist di Microsoft in attacchi ransomware tramite tecniche di ingegneria sociale. Scopri...


BreachForums è offline e sotto il controllo dell’FBI
Tempo di lettura: 2 minuti. Il noto portale di annunci legati al crimine informatico dove si vendono i dati trafugati...


Talos e CISA collaborano contro minacce Cyber a ONG e attivisti
Tempo di lettura: 2 minuti. Talos e CISA collaborano per proteggere le organizzazioni della società civile da minacce cyber, promuovendo...


DNS Tunneling: per tracciare vittime di Phishing
Tempo di lettura: 2 minuti. Gli hacker utilizzano il tunneling DNS per scandagliare le reti e tracciare le vittime, sfruttando...


Black Basta Ransomware è diventato un problema mondiale
Tempo di lettura: 2 minuti. Black Basta Ransomware ha colpito più di 500 entità in vari settori, sottolineando la crescente...


Pharmapiuit.com : sito truffa online dal 2023
Tempo di lettura: 2 minuti. Pharmapiuit.com è l'ultimo sito truffa ancora online di una serie di portali che promettono forti...


Temunao.Top: altro sito truffa che promette lavoro OnLine
Tempo di lettura: 2 minuti. Temunao.top è l'ennesimo sito web truffa che promette un premio finale a coloro che effettuano...


Attenti a Mazarsiu.com : offerta lavoro truffa da piattaforma Adecco
Tempo di lettura: 2 minuti. Dalla piattaforma Adecco ad un sito che offre lavoro attraverso le Google Ads: è la...


BogusBazaar falsi e-commerce usati per una truffa da 50 milioni
Tempo di lettura: 2 minuti. Oltre 850,000 persone sono state ingannate da una rete di 75,000 falsi negozi online, con...


Truffatori austriaci scappano dagli investitori, ma non dalla legge
Tempo di lettura: 2 minuti. Le forze dell'ordine hanno smascherato e arrestato un gruppo di truffatori austriaci dietro una frode...


Truffa dei buoni SHEIN da 300 euro, scopri come proteggerti
Tempo di lettura: < 1 minuto. La truffa dei buoni SHEIN da 300 euro sta facendo nuovamente vittime in Italia,...


USA interviene per recuperare 2,3 Milioni dai “Pig Butchers” su Binance
Tempo di lettura: 2 minuti. Il Dipartimento di Giustizia degli USA interviene per recuperare 2,3 milioni di dollari in criptovalute...


Truffa dimarcoutletfirenze.com: merce contraffatta e diversi dalle prenotazioni
Tempo di lettura: 2 minuti. La segnalazione alla redazione di dimarcoutletfirenze.com si è rivelata puntuale perchè dalle analisi svolte è...


No, la SEC non ha approvato ETF del Bitcoin. Ecco perchè
Tempo di lettura: 3 minuti. Il mondo delle criptovalute ha recentemente assistito a un evento senza precedenti: l’account Twitter ufficiale...


Europol mostra gli schemi di fronde online nel suo rapporto
Tempo di lettura: 2 minuti. Europol’s spotlight report on online fraud evidenzia che i sistemi di frode online rappresentano una grave...


MX Linux 23.3 “Libretto” rilasciato con Linux Kernel 6.8
Tempo di lettura: < 1 minuto. MX Linux 23.3 “Libretto” rilasciato con Linux Kernel 6.8 e componenti aggiornati, migliorando prestazioni...


iPhone SE 4: Face ID e prezzo inferiore ai $500
Tempo di lettura: 2 minuti. L'iPhone SE 4 di Apple, previsto per il 2025, includerà Face ID e un prezzo...


HMD Global potrebbe lanciare una nuova versione del Nokia Lumia
Tempo di lettura: < 1 minuto. HMD Global sta per lanciare una nuova versione del Nokia Lumia con design classico...


Fwupd 1.9.20: aggiunto supporto per i dispositivi di impronte digitali FPC FF2
Tempo di lettura: < 1 minuto. Fwupd 1.9.20 introduce il supporto per i dispositivi di impronte digitali FPC FF2, migliorando...


Vivo X Fold 3 Pro: lancio in India anticipato su Flipkart
Tempo di lettura: 2 minuti. Il Vivo X Fold 3 Pro sarà lanciato in India con un design elegante, display...


La ricerca AI di Google da fastidio? Disabilitare subito
Tempo di lettura: 2 minuti. Scopri come disabilitare la funzione AI Overviews di Google, che ha causato frustrazione tra gli...


iOS 18: l’Intelligenza Artificiale rivoluziona le notifiche
Tempo di lettura: 2 minuti. iOS 18 introduce notifiche intelligenti, miglioramenti a Siri e un chatbot AI di OpenAI, colmando...


iPhone 17 Slim: più sottile e costoso del Pro Max
Tempo di lettura: 2 minuti. L'iPhone 17 Slim sarà il più sottile e costoso della serie, superando il Pro Max....


Galaxy Z Flip 6 e Moto RAZR 50 Ultra: confronto in anteprima
Tempo di lettura: 2 minuti. Il Moto RAZR 50 Ultra sfida il Galaxy Z Flip 6 con una fotocamera teleobiettivo...


Blackview HERO 10: fotocamera da 108MP e Dynamic Island Android
Tempo di lettura: 2 minuti. Blackview lancia il HERO 10, uno smartphone flip con doppio schermo, fotocamera da 108MP e...
 Robotica1 settimana fa
Robotica1 settimana faCome controllare dei Robot morbidi ? MIT ha un’idea geniale
- Inchieste6 giorni fa
Melinda lascia la Bill Gates Foundation e ritira 12,5 Miliardi di Dollari
- L'Altra Bolla7 giorni fa
Discord celebra il nono compleanno con aggiornamenti e Giveaway
- Inchieste6 giorni fa
Terrore in Campania: dati sanitari di SynLab nel dark web
- Economia1 settimana fa
Ban in Germania per alcuni prodotti Motorola e Lenovo
- Smartphone4 giorni fa
Samsung Galaxy S25 Ultra: Quattro fotocamere in Arrivo
- Smartphone1 settimana fa
Samsung Galaxy S25 Ultra avrà una Fotocamera rispetto all’S24
- Economia1 settimana fa
Cy4Gate: accordo da un milione con Innovery