Robotica
L’Intelligenza Artificiale incontra la Robotica
Tempo di lettura: 2 minuti. La robotica si avvicina ad essere ancora più vicina all’intelligenza artificiale e già dal 2024 ci saranno novità commerciali

L’era dell’intelligenza artificiale (AI) ha raggiunto un punto di svolta con i modelli di base come GPT, che hanno trasformato il nostro approccio al digitale usando la robotica. Ora, l’attenzione si sposta verso la robotica, con l’obiettivo di creare robot AI che apprendono l’interazione con il mondo fisico, promettendo di rivoluzionare il lavoro ripetitivo in settori come logistica, trasporti, manifattura, vendita al dettaglio, agricoltura e sanità.
- Il successo di GPT e il suo approccio
GPT si basa su un modello di AI addestrato su un vasto e variegato set di dati, che si è dimostrato più efficace di qualsiasi modello specializzato. Questo approccio ha permesso di generalizzare l’apprendimento per nuovi compiti, beneficiando delle competenze acquisite in una gamma diversificata di attività.
Dati di qualità e apprendimento per rinforzo
Per avere un AI generalizzato, è cruciale l’accesso a una grande quantità di dati diversificati e di alta qualità. GPT si è allenato su dati raccolti da tutto l’internet, inclusi libri, articoli di giornale, post sui social media, codice e altro. L’apprendimento per rinforzo da feedback umano (RLHF) è stato utilizzato per allineare le risposte del modello con le preferenze umane, superando i limiti dell’apprendimento supervisionato.
Robotica: il prossimo confine per i modelli di base
La tecnologia alla base di GPT che permette di “vedere” e “pensare” è la stessa che abilita i robot a comprendere l’ambiente fisico, prendere decisioni informate e adattare le azioni a circostanze in cambiamento. Il “GPT per la robotica” sta seguendo lo stesso percorso di sviluppo di GPT, ponendo le basi per una rivoluzione che ridefinirà l’AI.
Sfide e crescita esplosiva
La costruzione di un prodotto AI che possa operare in una varietà di contesti reali presenta sfide fisiche complesse. L’AI deve adattarsi a diverse applicazioni hardware e ambienti di apprendimento come magazzini e centri di distribuzione, ideali per fornire i dati necessari all’addestramento del “GPT per la robotica”.
Il momento “GPT” della robotica AI è vicino
Con l’accelerazione della traiettoria di crescita dei modelli di base robotici, le applicazioni robotiche, in particolare quelle che richiedono una manipolazione precisa degli oggetti, stanno già trovando applicazione in ambienti di produzione reali. Nel 2024, ci aspettiamo un numero esponenziale di applicazioni robotiche commercialmente valide implementate su larga scala.










Robotica
Sistema robotico innovativo per l’alimentazione assistita
Tempo di lettura: 2 minuti. Nuovo sistema robotico sviluppato dalla Cornell University può assistere l’alimentazione di persone con gravi limitazioni motorie.

Ricercatori della Cornell University hanno sviluppato un sistema robotico avanzato per l’alimentazione assistita con gravi limitazioni motorie, utilizzando visione artificiale, apprendimento automatico e sensoristica multimodale. Questo sistema promette di migliorare notevolmente la qualità della vita per individui affetti da lesioni al midollo spinale, paralisi cerebrale e sclerosi multipla.
Dettagli della tecnologia
Il sistema, presentato con un articolo intitolato “Feel the Bite: Robot-Assisted Inside-Mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control”, è stato riconosciuto con una menzione d’onore per il miglior articolo durante la conferenza Human Robot Interaction tenutasi a Boulder, Colorado. Il sistema si distingue per la sua capacità di adattarsi in tempo reale ai movimenti del paziente e per la sensibilità alle interazioni fisiche, permettendo un’alimentazione precisa e sicura.
Sfide e innovazioni
Alimentare roboticamente individui con severe limitazioni motorie presenta sfide uniche, poiché molti non possono inclinarsi in avanti e necessitano che il cibo venga posizionato direttamente nella bocca. Il sistema utilizza un braccio robotico multiarticolato dotato di un utensile personalizzato che può rilevare le forze applicate. Una delle maggiori sfide è gestire la fase finale del movimento, ossia il trasferimento del boccone all’interno della bocca, che spesso è complicata da aperture limitate della bocca e spasmi muscolari involontari.
Funzionamento del Sistema
Il sistema è equipaggiato con tracciamento della bocca in tempo reale che si adatta ai movimenti del paziente e un meccanismo di risposta dinamica che permette al robot di rilevare la natura delle interazioni fisiche man mano che si verificano. Ciò consente al sistema di distinguere tra spasmi improvvisi, morsi intenzionali e tentativi dell’utente di manipolare l’utensile con la lingua.
Test e risultati
Il sistema è stato testato con successo su 13 individui con diverse condizioni mediche in tre diverse località: il laboratorio EmPRISE sulla Cornell Ithaca campus, un centro medico a New York City e la casa di un paziente nel Connecticut. I partecipanti hanno trovato il sistema sicuro e confortevole. Questo rappresenta una delle valutazioni real-world più estese di un sistema robotico autonomo di alimentazione assistita.
Impatto e prospettive future
Questo sistema non solo migliora l’autonomia e la qualità della vita dei pazienti, ma ha anche un impatto emotivo significativo sui caregiver e sui familiari dei pazienti. Durante una sessione, i genitori di una ragazza con schizencefalia quadriplegica hanno assistito alla sua capacità di nutrirsi autonomamente usando il sistema, un momento di grande emozione e trionfo.
Questo sviluppo rappresenta un passo significativo nel campo della robotica assistiva, dimostrando il potenziale di migliorare sostanzialmente la vita di persone con gravi disabilità motorie. Con ulteriori ricerche e sviluppo, il sistema promette di espandere le sue applicazioni e di rendere l’alimentazione un’esperienza più indipendente e dignitosa per molti.
Robotica
AI Generativa imita il movimento umano per la robotica
Tempo di lettura: 2 minuti. Scopri come la nuova AI generativa sviluppata da un team internazionale imita il movimento umano, migliorando l’adattabilità e la stabilità in robotica.

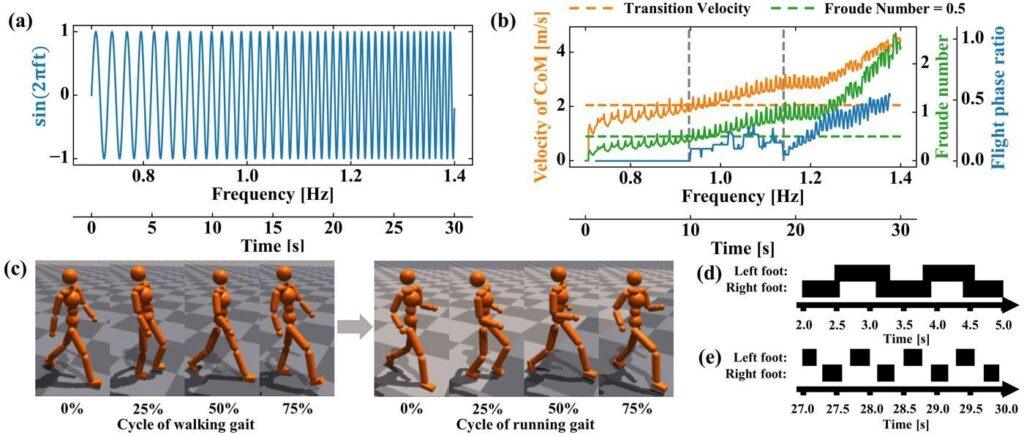
Un gruppo internazionale di ricercatori ha sviluppato un nuovo metodo per imitare il movimento umano nella robotica, combinando generatori di pattern centrali (CPG) e apprendimento profondo per rinforzo (DRL). Questa innovazione non solo replica i movimenti di camminata e corsa, ma genera anche movimenti per frequenze di dati assenti, permette transizioni fluide tra camminata e corsa, e si adatta a superfici instabili.
Dettagli della Ricerca
Pubblicati sulla rivista IEEE Robotics and Automation Letters il 15 aprile 2024, i dettagli di questa ricerca segnano un progresso significativo nella robotica e nell’intelligenza artificiale. Camminare e correre sono attività complesse che coinvolgono ridondanze biologiche, consentendo agli esseri umani di adattarsi agli ambienti variabili. Riprodurre questi movimenti in modo realistico nei robot ha presentato notevoli sfide, soprattutto quando i modelli devono operare in ambienti sconosciuti o complessi.
Innovazioni tecnologiche
I CPG sono circuiti neurali situati nel midollo spinale che, come un direttore d’orchestra biologico, generano schemi ritmici di attività muscolare. In natura, un circuito riflesso lavora in tandem con i CPG per fornire feedback adeguato, permettendo agli animali di regolare la loro velocità e il movimento in base al terreno.
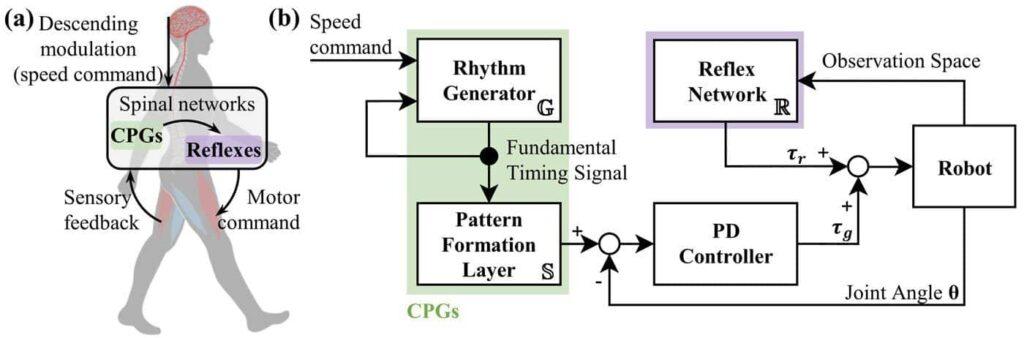
L’approccio dei ricercatori ha combinato l’apprendimento per imitazione, dove un robot apprende imitando i dati di movimento umano, con l’apprendimento profondo per rinforzo, che utilizza reti neurali profonde per gestire compiti più complessi e apprendere direttamente da input sensoriali grezzi. Questo metodo ha superato molti limiti degli approcci esistenti, grazie all’uso di una rete neurale riflessa che supporta i CPG, aumentando significativamente la stabilità e l’adattabilità del movimento generato.
Applicazioni e implicazioni future
Questa ricerca non solo stabilisce nuovi standard per il movimento robotico umanoide, ma apre anche la strada a future applicazioni in vari settori, dalla robotica assistiva all’industria manifatturiera, e potenzialmente alla ricerca e soccorso in ambienti pericolosi o inaccessibili. La capacità di adattarsi e reagire a situazioni dinamiche in tempo reale rappresenta un salto significativo verso robot più autonomi e funzionali.
Il metodo AI-CPG rappresenta un passo avanti significativo nello sviluppo di tecnologie AI generative per il controllo dei robot, con potenziali applicazioni che attraversano diverse industrie. Questo progresso non solo migliora la nostra comprensione dei sistemi biologici complessi ma anche come questi principi possono essere emulati in sistemi artificiali per realizzare robot più efficienti e adattabili.
Robotica
Origami e ingegneria: l’innovativo Robot morbido
Tempo di lettura: 2 minuti. L’antica arte dell’origami e la scienza dei materiali moderna si uniscono per creare un robot morbido che naviga facilmente attraverso labirinti complessi.

Gli ingegneri di Princeton e della North Carolina State University hanno rivoluzionato il campo della robotica morbida combinando l’antica arte dell’origami con la scienza dei materiali moderna ed il risultato è un robot morbido che può muoversi agilmente attraverso percorsi tortuosi e complessi senza la necessità di sistemi di guida esterni che ne comprometterebbero la flessibilità.
Innovazione nel Design
Il robot è costituito da segmenti cilindrici modulari che possono operare in modo indipendente o collegarsi per formare un’unità più lunga. Questi segmenti sono cruciali per la capacità del robot di muoversi e sterzare. Ogni segmento è capace di muoversi avanti e indietro, sollevare carichi e assemblarsi in formazioni più estese, rendendo il robot estremamente versatile e adattabile a vari compiti.
Tecnologia di Controllo Integrata
La grande novità di questo design risiede nella sua capacità di incorporare il sistema di sterzo direttamente nel corpo del robot, come spiegato da Tuo Zhao, ricercatore post-dottorato a Princeton. Questa integrazione consente al robot di mantenere la sua flessibilità essenziale per navigare attraverso spazi ristretti e ambienti complessi.
Applicazioni di Origami nella Robotica
Il robot utilizza una forma di origami chiamata “Kresling pattern”, che permette a ciascun segmento di torcersi in un disco appiattito e di espandersi nuovamente in un cilindro. Questo movimento di torsione e espansione è fondamentale per la capacità del robot di strisciare e cambiare direzione.
Metodologia di attuazione
Per controllare i movimenti di piegatura e torsione necessari per guidare il robot, i ricercatori hanno sviluppato una soluzione ingegnosa. Hanno utilizzato due materiali che si restringono o espandono in modo diverso quando riscaldati (elastomero cristallo liquido e poliimide), combinati in strisce sottili lungo le pieghe del modello Kresling. Un sottile riscaldatore elastico realizzato con una rete di nanofili d’argento è installato lungo ogni piega, permettendo un controllo preciso del movimento tramite la regolazione della corrente elettrica.
Potenzialità e futuro
Glaucio Paulino, professore di Ingegneria presso Princeton, vede un grande potenziale in questa tecnologia, suggerendo possibili applicazioni in robotica morbida che possono crescere, ripararsi e sviluppare nuove funzioni su richiesta. Il concetto di robot modulari morbidi potrebbe fornire intuizioni significative per il futuro della robotica.
Sviluppi Futuri
Nonostante la velocità attuale del robot sia limitata, i ricercatori stanno lavorando per aumentare la locomozione nelle generazioni future. Sperimentazioni con diverse forme, modelli e instabilità sono in corso per migliorare sia la velocità che la capacità di sterzata.
Questo avanzamento nel campo della robotica morbida non solo apre nuove strade per applicazioni pratiche ma anche incita a ulteriori ricerche sull’uso dell’origami in ingegneria. Con il supporto della National Science Foundation e del National Institutes of Health, il futuro della robotica morbida sembra promettente e pieno di possibilità innovative. Questa ricerca non solo dimostra il potenziale dell’interdisciplinarità nell’ingegneria ma sottolinea anche l’importanza della collaborazione e dell’innovazione continua per affrontare e superare le sfide tecniche nel campo della robotica.




Disastro Dell: violazione dati di 49 Milioni di clienti
Tempo di lettura: 2 minuti. Dell annuncia una violazione dei dati che ha esposto nomi e indirizzi di 49 milioni...


Nuovo attacco “Pathfinder” alle CPU Intel: è il nuovo Spectre?
Tempo di lettura: 2 minuti. Pathfinder mira ai CPU Intel, in grado di recuperare chiavi di crittografia e perdere dati...


Nuovo attacco “TunnelVision” espone il traffico VPN
Tempo di lettura: 2 minuti. Scopri come il nuovo attacco TunnelVision utilizza server DHCP malevoli per esporre il traffico VPN,...


Esplosione di malware JavaScript nei Siti con plugin LiteSpeed Cache
Tempo di lettura: 2 minuti. Scopri l'impennata di malware JavaScript che colpisce i siti con versioni vulnerabili del plugin LiteSpeed...


Ransomware in Italia: come cambia la percezione del fenomeno nell’IT
Tempo di lettura: 5 minuti. I ransowmare sembrano essere passati di moda per il poco clamore suscitato in un paese...


NSA, FBI e Dipartimento di Stato affrontano le minacce informatiche nordcoreane
Tempo di lettura: 2 minuti. NSA, FBI e Stato emettono un avviso sulle minacce nordcoreane, esortando politiche DMARC più forti...


Cisa e Aruba minacciate per vulnerabilità ICS e di rete
Tempo di lettura: 2 minuti. CISA e FBI evidenziano nuove minacce alla sicurezza dei sistemi di controllo industriale e delle...
Apple, Regno Unito vuole più sicurezza informatica e l’Europa indica iPadOS Gatekeeper
Tempo di lettura: 2 minuti. Apple, nuove sfide normative con l'introduzione del PSTI Act nel Regno Unito e la designazione...


ACN: tutto quello che c’è da sapere sulla relazione annuale 2023
Tempo di lettura: 9 minuti. L'ACN presenta la relazione annuale sulle attività della cybersecurity in Italia nel 2023 ed i...


Vulnerabilità critiche nel software Cisco: dettagli e soluzioni
Tempo di lettura: 2 minuti. Cisco affronta vulnerabilità critiche nel suo software ASA e FTD, rilasciando aggiornamenti per prevenire attacchi...


BogusBazaar falsi e-commerce usati per una truffa da 50 milioni
Tempo di lettura: 2 minuti. Oltre 850,000 persone sono state ingannate da una rete di 75,000 falsi negozi online, con...


Truffatori austriaci scappano dagli investitori, ma non dalla legge
Tempo di lettura: 2 minuti. Le forze dell'ordine hanno smascherato e arrestato un gruppo di truffatori austriaci dietro una frode...


Truffa dei buoni SHEIN da 300 euro, scopri come proteggerti
Tempo di lettura: < 1 minuto. La truffa dei buoni SHEIN da 300 euro sta facendo nuovamente vittime in Italia,...


USA interviene per recuperare 2,3 Milioni dai “Pig Butchers” su Binance
Tempo di lettura: 2 minuti. Il Dipartimento di Giustizia degli USA interviene per recuperare 2,3 milioni di dollari in criptovalute...


Truffa dimarcoutletfirenze.com: merce contraffatta e diversi dalle prenotazioni
Tempo di lettura: 2 minuti. La segnalazione alla redazione di dimarcoutletfirenze.com si è rivelata puntuale perchè dalle analisi svolte è...


No, la SEC non ha approvato ETF del Bitcoin. Ecco perchè
Tempo di lettura: 3 minuti. Il mondo delle criptovalute ha recentemente assistito a un evento senza precedenti: l’account Twitter ufficiale...


Europol mostra gli schemi di fronde online nel suo rapporto
Tempo di lettura: 2 minuti. Europol’s spotlight report on online fraud evidenzia che i sistemi di frode online rappresentano una grave...


Polizia Postale: attenzione alla truffa dei biglietti ferroviari falsi
Tempo di lettura: < 1 minuto. Gli investigatori della Polizia Postale hanno recentemente individuato una nuova truffa online che prende...

App Falsa di Ledger Ruba Criptovalute
Tempo di lettura: 2 minuti. Un'app Ledger Live falsa nel Microsoft Store ha rubato 768.000 dollari in criptovalute, sollevando dubbi...


Google: pubblicità malevole che indirizzano a falso sito di Keepass
Tempo di lettura: 2 minuti. Google ospita una pubblicità malevola che indirizza gli utenti a un falso sito di Keepass,...


Scoperte rivoluzionarie nella mappatura del cervello umano
Tempo di lettura: 3 minuti. Scoperte rivoluzionarie nella mappatura del cervello umano potrebbero illuminare le basi di disturbi e malattie.


Mixxx 2.4.1: supporto ai controller e compatibilità di sistema
Tempo di lettura: 2 minuti. Scopri Mixxx 2.4.1, l'aggiornamento del software DJ con supporto migliorato per controller e nuove funzionalità.


Sistema robotico innovativo per l’alimentazione assistita
Tempo di lettura: 2 minuti. Nuovo sistema robotico sviluppato dalla Cornell University può assistere l'alimentazione di persone con gravi limitazioni...


Huawei Pura: prodotti Pad, Drive, Key, Watch, Ultra, View, Wear
Tempo di lettura: 2 minuti. Huawei sta ampliando il nuovo marchio Pura con una gamma di dispositivi che include PuraPad,...


WhatsApp si rinnova: nuovi colori, icone e modalità dark migliorata
Tempo di lettura: 2 minuti. WhatsApp annuncia un importante rinnovamento con nuovi colori, icone migliorate, e una modalità dark più...


AI Generativa imita il movimento umano per la robotica
Tempo di lettura: 2 minuti. Scopri come la nuova AI generativa sviluppata da un team internazionale imita il movimento umano,...


Apple M4 supera Intel i9-14900KS in prestazioni Single-Core
Tempo di lettura: 2 minuti. Scopri il nuovo Apple M4, il processore che batte Intel i9-14900KS in prestazioni single-core con...


Nubia Flip 5G vs. Motorola Razr 2023: quale Flip Phone scegliere?
Tempo di lettura: 3 minuti. Esplora le differenze tra il Nubia Flip 5G e il Motorola Razr 2023, due opzioni...


Bug dell’orologio nella schermata di blocco del Galaxy S23 con One UI 6.1
Tempo di lettura: < 1 minuto. Un bug dell'orologio nella schermata di blocco del Galaxy S23 con One UI 6.1...


iPhone 14 Pro vs iPhone 16 Pro: 50 aggiornamenti di differenza
Tempo di lettura: 2 minuti. Scopri le oltre 50 innovazioni previste per l'iPhone 16 Pro rispetto all'iPhone 14 Pro, incluse...
 Inchieste2 settimane fa
Inchieste2 settimane faPapa Francesco sarà al G7 e l’Italia festeggia il DDL AI
- Cyber Security2 settimane fa
ACN: tutto quello che c’è da sapere sulla relazione annuale 2023
- Robotica2 settimane fa
Perché i Robot non riescono a superare gli animali in corsa?
- Economia1 settimana fa
Apple, Regno Unito vuole più sicurezza informatica e l’Europa indica iPadOS Gatekeeper
- Editoriali1 settimana fa
Chip e smartphone cinesi ci avvisano del declino Occidentale
- L'Altra Bolla2 settimane fa
ByteDance “chiuderà TikTok negli USA piuttosto che venderlo”
- Inchieste6 giorni fa
Ransomware in Italia: come cambia la percezione del fenomeno nell’IT
- Economia7 giorni fa
Internet via satellite: progetto europeo IRIS² in grande difficoltà









